Actúa localmente: robots asistentes en cirugía

La automatización era el futuro hace 50 años. Lo robotización es un futuro tan próximo que es presente. Y lo que parece una tendencia imparable es la robotización de todos los ámbitos de la actividad humana. Pero no hay que pensar necesariamente en robots completamente autónomos, como los de la película Yo Robot (Alex Proyas, 2004) basada en el libro homónimo de 1950 de Isaac Asimov. La integración de los robots en nuestro día a día será como colaboradores. Un ejemplo ilustrativo es el robot como asistente en intervenciones quirúrgicas muy delicadas.
Pongamos el caso de las intervenciones de columna que se quiere que sean mínimamente invasivas. En términos muy simples, en este tipo de intervenciones hay que saber con precisión donde colocar los tornillos para maximizar su efecto y asegurarse de que no se hace más daño del que se pretende solucionar al tocar la médula espinal.
Ceit y Egile colaboran en el proyecto ELCANO que lo que pretende es, precisamente, desarrollar una solución integrada y robotizada para este tipo de intervenciones. La persona encargada de la cirugía es la que decide y realiza la operación; el robot le ayudará en los cálculos y en evitar que se produzcan daños. Esta ayuda se concreta en tres aspectos, los dos primeros son los que permiten el tercero, que es la actuación del robot:
Planificación virtual de la intervención*
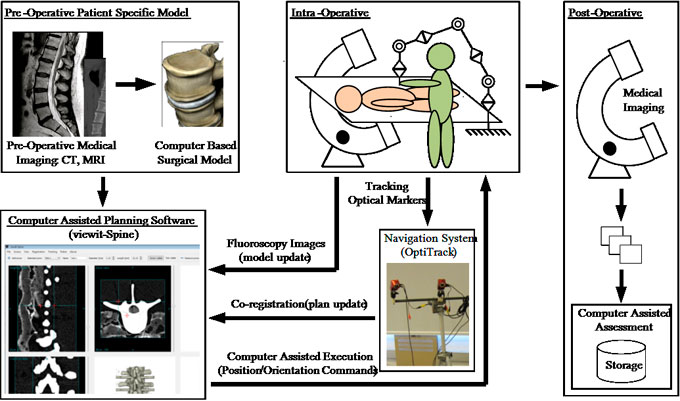
Los hospitales suelen contar con un Sistema de Comunicación y Archivado de Imágenes (PCAS, por sus sigles en inglés). Su función primordial es almacenar imágenes y facilitar la comunicación entre los servicios del hospitale. Un sistema PACS ideal debe atender todo el flujo de imagen, desde la adquisición del examen, hasta el diagnóstico, proceso de informe y monitoreo.
Antes de la intervención*, un programa software planificador (viewIT-spine) extrae información del historial del paciente desde el sistema PACS y reconstruye un modelo virtual del paciente basado en las imágenes de TAC disponibles que permitirá al cirujano hacer una planificación de la intervención, definiendo la posición y orientación de los tornillos que desea introducir en el paciente, desde su despacho. Una vez terminada la planificación, ésta se envia al quirófano.
Sistema de navegación/tracking
Un dispositivo instalado en quirófano es capaz de monitorizar en tiempo real la posición real del paciente de forma que pueda hacerse una correlación de la disposición del paciente real con el modelo virtual construido con el planificador. Para ello un módulo del software viewIT-spine se ejecuta en tiempo real en quirófano.
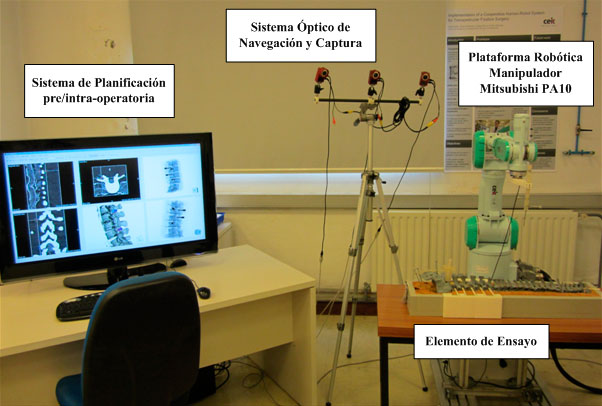
Asistente colaborativo robotizado (COBOT)
Un COBOT es un sistema robótico capaz de recibir información del planificador. Este robot es capaz de configurar unas restricciones activas de movimiento y trabajar de forma colaborativa con el cirujano (COllaborative roBOT) para facilitar la intervención. A la vez, las restricciones de movimiento limita los movimientos del cirujano para impedir el acceso a las zonas de riesgo.

* Nota para profesionales:
Intervenciones de fusión instrumentada con tornillos transpediculares. El concepto es aplicable a otro tipo de intervenciones, como artrodesis intersomática por vía lateral ALIF o TLIF.
Sobre el autor: César Tomé López es divulgador científico y editor de Mapping Ignorance

Tokian tokiko jarduera: kirurgian laguntzen duten robotak – Zientzia Kaiera
[…] irudia: ELCANO proiektua. (Argazkia: Cuaderno de Cultura Científica […]